About Me
I am on a mission to change the world.
Here are some of the most significant things I have done so far:
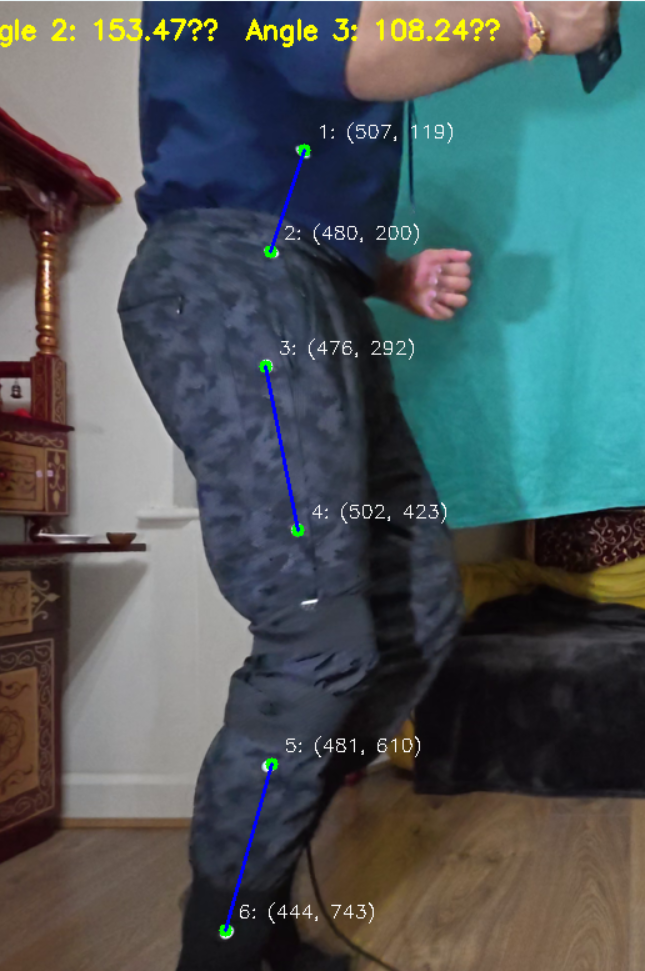
- Inventing a device to prevent career-ending knee injuries.
- Inventing a device to reduce the rehabilitation time for stroke rehabilitation.
- Developing an AI app to predict COVID-19 spread to save lives.
But this is just the beginning. My vision is to make the world a better place. How? In my lifetime, I will bring together some of the greatest minds to tackle humanity’s most pressing challenges: lack of food and clean water, homelessness, poverty, disease, and the pollution of our skies, land, and oceans.
The vehicle for this mission will be an Engineering Consultancy and venture capital firm. Through this platform, I will attract the brightest talent, collaborate with established companies, and fund groundbreaking startups to address the world’s greatest issues.
I refuse to accept these problems are unsolvable. Doing so just isn't an ambition.
It's my purpose.
Technical Skills
Leadership Experience
Education
- CAD / CAM / EDA
Fusion 360 | SolidWorks | OnShape | KiCad | DipTrace | Cura | Slic3r | InkScape - Fabrication Proficiencies
Metal working | Engineering Drawings | Precision Machining | Soldering | Rapid Prototyping - HDL / Programming Languages
Verilog | Quartus Prime TCL | Python | C | C++ | MatLab | G Code | M Code | HTML | CSS | JavaScript
- Co-Founder & CTO @ Hippos Exoskeleton
Led the company's R&D to raise $642,000 in venture capital and angel funding - Sergeant Major @ Combined Cadet Force
Spent 5+ years and led 80+ Cadets through military-style and weapons training - Corporal of Horse @ Army Cadet Force
Spent 2 years volunteering to deliver military-style training to 240+ Army Cadets. - President @ UCL Fleming Society
Led 20+ committe members to organise a record breaking number of academic, practical, industry and social events for 800+ students
- MEng 1st Class with Honours
Electronic and Electrical Engineering with Computer Science at University College London (UCL) - BTEC Level 2 Diploma
Teamwork, Leadership and Community Service - MoD Defence Qualifications
First Aid | Navigation | Weapon Handling | Adventure Training | APCA | CQB | CFIT